
בעקבות תצוגת הרובוטים באירועי "ליל המדענים" המקומיים, ולמרות הפאשלה שקרתה שם, הילדים היו נלהבים מהנושא וביקשו לבנות רובוט בבית. כדי לא לפספס את חלון ההזדמנויות של העניין בתחום, בניתי להם רובוט פשוט הרבה יותר, שהתחיל בתור מכונה שנותנת כיפים והפך בסוף לחתול מזל יפני. הנה הפרטים.

העקרונות שהנחו אותי היו, קודם כל, שהפרויקט יושלם מהר. כלומר, לא משהו מורכב מדי, ותוך שימוש במה שכבר נמצא בהישג יד כדי לחסוך המתנה לחלקים ורכיבים. כמו כן רציתי שגם אם הילדים לא יוכלו לתכנן ולהרכיב אותו לבד, הם כן יוכלו לראות ולהבין בדיוק (עד כמה שניתן) כל אלמנט ושלב במבנה ובפונקציונליות של הרובוט.
הכיוון הראשוני היה לבנות מכונה עם זרוע מכנית וחיישן מרחק, שתרים ותוריד את הזרוע שוב ושוב כאשר משהו נמצא קרוב מספיק – ואם החיישן ימוקם נכון, הזרוע בעצם "תיתן כיף" לכף יד שתושט אליה. חיישן מתאים למשימה הוא ה-E18-D80NK, ואת תנועת הזרוע אפשר לממש בהרבה אופנים. מנוע סרבו הוא פתרון סטנדרטי לתנועה כזו, אבל יש לו חיסרון: הדבר שגורם לו לפעול ולהגיע לזוויות שונות נסתר מהעין. ילד קטן או צופה נאיבי אחר יראה שהזרוע עולה ויורדת, אך לא יוכל להבין למה בלי הסבר תיאורטי יבש.
גם מנוע הצעד (סטפר) שבחרתי בסופו של דבר לא מובן מאליו. עם זאת, ברובוט הספציפי הזה הוא מסתובב בכיוון ובמהירות קבועים או בכלל לא, כך שכמות הפעולות הנסתרות מהעין מצטמצמת למינימום, כמעט כמו במנוע DC רגיל.
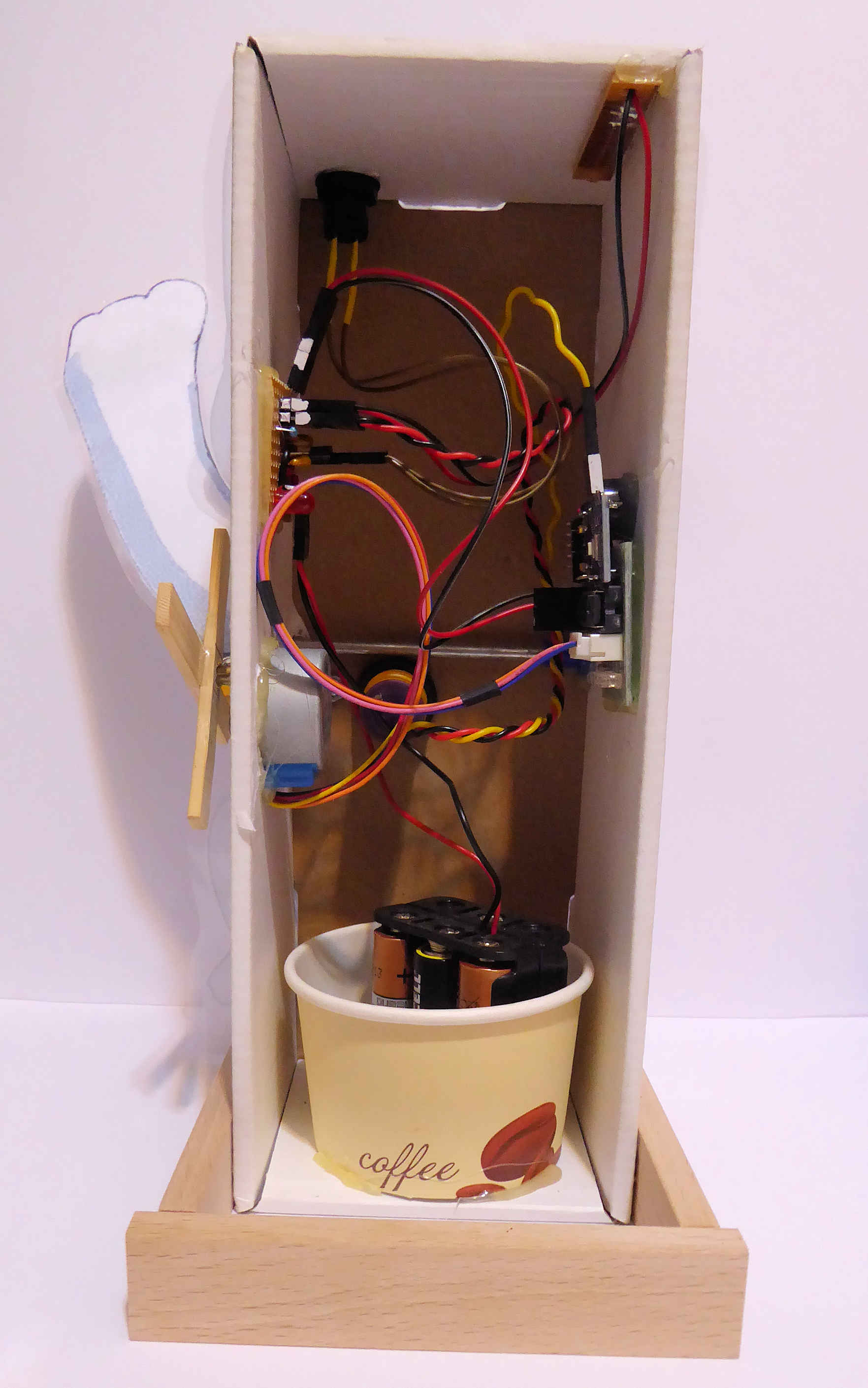
הרובוט כולל, אם כן, בית סוללות 6xAA ומפסק ראשי. אחרי המפסק יש פיצול: שני חוטים (פלוס ומינוס) עוברים ישירות למודול השליטה בסטפר (כתוב עליו 5-12V, אז זה בסדר) ולארדואינו פרו מיני שמפעיל אותו. בנוסף, יש מייצב מתח מהסוללות ל-5V, שממנו יוצאים חוטים ללד האינדיקציה החיצוני הצהוב (דולק כל עוד הרובוט פועל) ולחיישן. הפלט מהחיישן נכנס ישירות לפין קלט דיגיטלי של הארדואינו. לד נוסף, אדום, בתוך גוף הרובוט מחובר אחרי המפסק הראשי ועוזר לוודא שמתקבל מתח מהסוללות. כמעט כל החיווטים הם בחיבור DuPont ולא בהלחמה, כדי שאפשר יהיה לנתק אותם ולחבר מחדש בקלות.
קוד הארדואינו בסיסי ביותר: הוא בודק כל הזמן את הקלט מהחיישן, ואם החיישן מזהה משהו, מפעיל את המנוע בקצב אחיד. כמו כן, לארדואינו מחובר באזר קטן, והארדואינו משמיע בעזרתו צפצוף קצר פעם בשלושים שניות – כדי להזכיר לנו לכבות את הרובוט אם גמרנו לשחק איתו ולא שמנו לב שהוא עדיין דולק…
קופסת קרטון מוארכת שימשה בית טוב לכל הרכיבים והחיווט, אבל רציתי גם חזית סימפטית יותר כדי להפוך את הרובוט לידידותי-למראה, אז נזכרתי במאנקי נקו, הסמל היפני המפורסם של חתול שמרים את כפו הקדמית או מנופף בה כדי להזמין את המזל. מצאתי איור מתאים ברשת, בתוכנת ציור התאמתי אותו להפרדה בין הגוף לבין הזרוע, הדפסתי את החלקים וניילנתי אותם במכונת למינציה. את הציר שעליו הזרוע מסתובבת, ואת המבנה הקטן שמחזיק את הזרוע על הציר, בניתי מחלקי צעצועים ישנים.
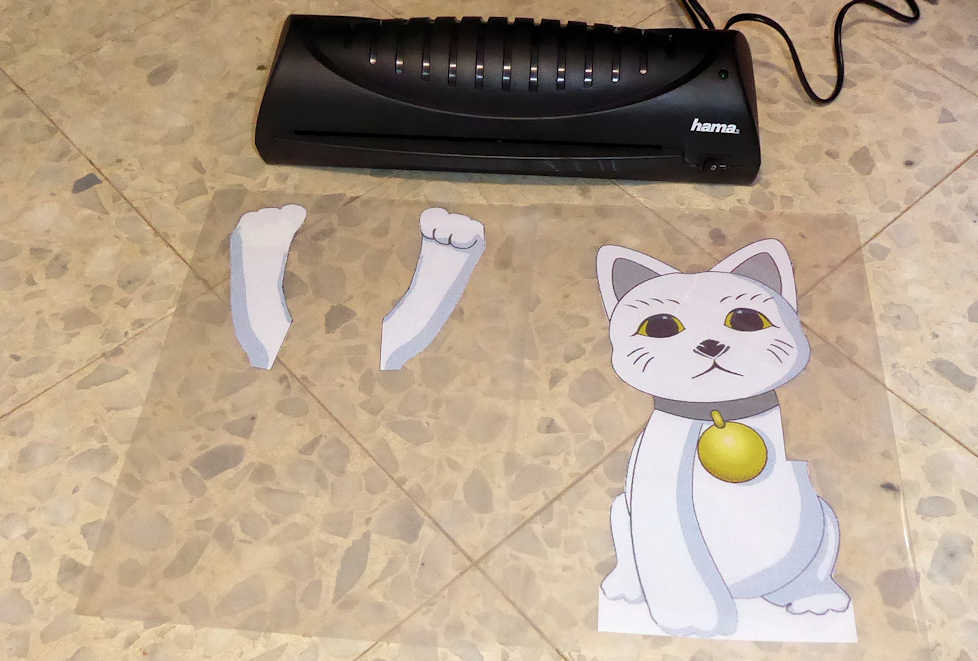
חזית וזרוע הרובוט בשלב הלמינציה
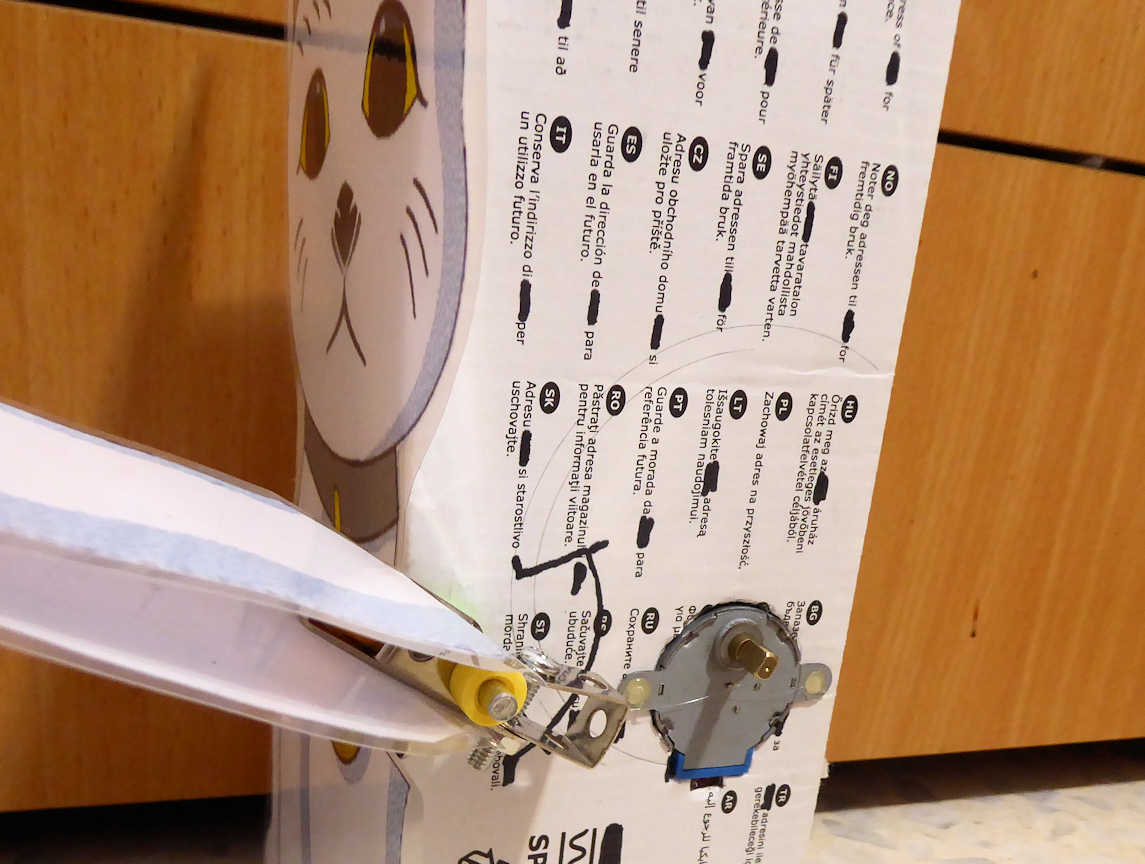
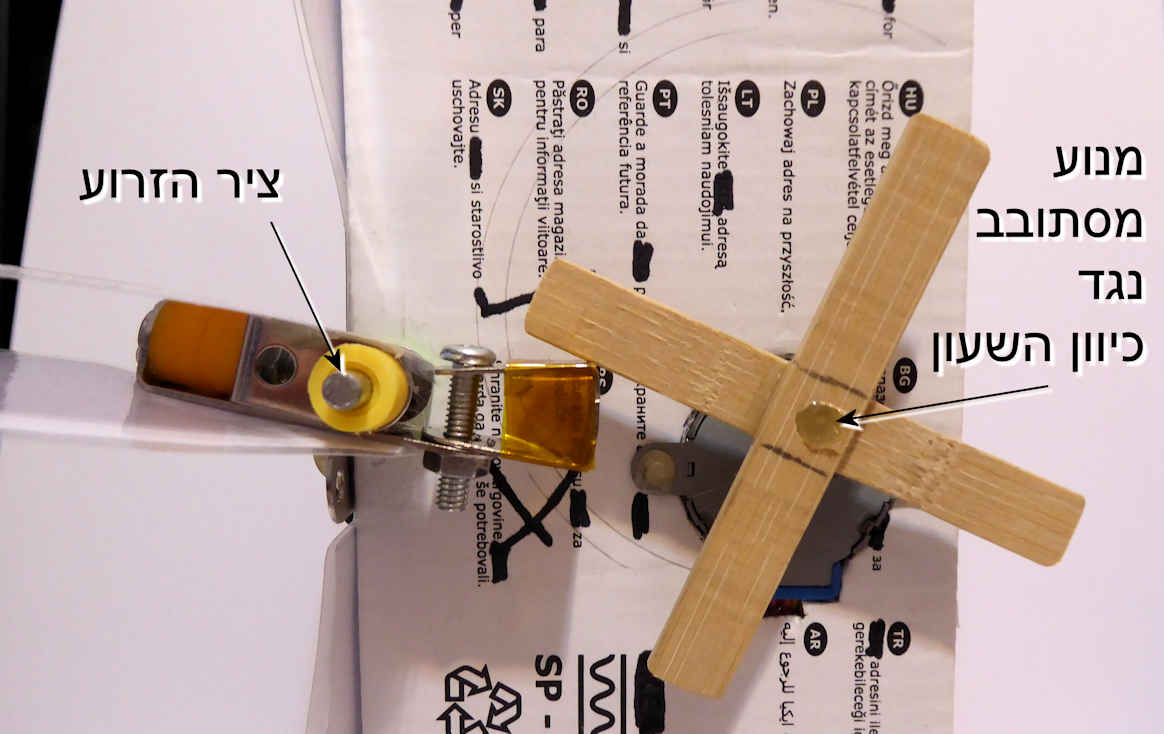
האתגר המכני שנותר היה למצוא את המקום הנכון עבור הסטפר, כך שיוכל לגרום לזרוע לעלות ולרדת בטווח הרצוי ובלי להיתקע (התנועה כלפי מטה נעשית בכוח המשיכה, ברגע ששום דבר לא דוחף אותה למעלה או מחזיק אותה במקום). לשם כך סימנתי בטוש על צד הקופסה את נקודות הקצה ואת המתווה של תנועת הזרוע, ובעזרת מחוגה בחנתי מיקומים וקטרים שונים עד שמצאתי עיגול תיאורטי, שבליטה תיאורטית שתסתובב על הקוטר שלו תגרום לתנועה הרצויה של הזרוע. התקנתי את המנוע כך שהציר שלו יהיה במרכז העיגול הזה, ומשיפוד עץ רחב חתכתי והדבקתי בצורת צלב שני קטעים כך שכל אחד מהם ישרטט, כביכול, בקצותיו את הקוטר הנכון.
אחרי שווידאתי שהכול עובד חיזקתי את החלקים למקומם בדבק חם, ייצבתי את הבסיס בעזרת מקלות עץ קטנים, וגם הדבקתי חצי כוס חד-פעמית לתחתית, כדי שתחזיק את הסוללות שלא יפלו החוצה בזמן שינוע הרובוט ועדיין יהיו נגישות בקלות להחלפה.
הרובוט עבד היטב, הילדים הפעילו, שיחקו איתו וכיבו אותו, אבל כשאחד מהם הושיט יד פנימה וניתק את פלט החיישן מהארדואינו כדי לראות שזה באמת מפסיק לעבוד – באותו רגע הבנתי שזהו, ניצחתי 🙂
הנה סרטון קצר של הרובוט בפעולה, בגרסה כמעט-סופית:
איך אפשר לראות את התוכנית שיש על הארדואינו ???
תודה
לא שמרתי, בגדול זה קוד פשוט מאוד – אפשר למצוא המון דוגמאות ברשת לשליטה במנוע סטפר, ומוסיפים לזה לולאת while שבודקת אם החיישן זיהה משהו.
איך חיברת שם את הנאנו לקופסה? זה נראה ממש טוב!
הנאנו מולחם דרך כמה פינים ללוח הדרייבר של המנוע, והלוח הזה מודבק בדבק חם לקרטון. בין הנאנו לקרטון, למעלה, נמצא גם רמקול הפיאזו הקטן, וגם הוא עם קצת דבק חם.
אהבתי!
גם את שיטת החינוך וגם את האלקטרוניקה והמכניקה.
אגב, יש לך פתרון לחידת החיישן?(תפקיד הרכיב השקוף ואופן יצירת התדר?
ומה היתרון של רכיב זה על פני חיישן ir סטנדרטי?
היתרון של החיישן הזה הוא שקל להתקין אותו (עם ההברגה ואום הפלסטיק) ואפשר לכוון את הטווח שלו בקלות, בין 20-80 ס"מ בערך. הוא גם מגיע מוכן עם חוטים נוחים 🙂
מהניסויים שעשיתי ומהתייעצויות בפורומים בחו"ל, כנראה שהמקלט בתוך החיישן מגיב לטווח רחב של תדרים, והלד המשדר מופעל בתדר גבוה על ידי hack שעשו לרכיב מקלט נוסף שנמצא בצד השני של החיישן. איך הצליחו להפיק מהמקלט תדר, את זה אף אחד לא יודע…