האם אפשר לנסח אלגוריתם לקריאה של מקודד סיבובי, שפותר לגמרי את בעיית ה-Bounce מצד אחד, ומצד שני לא נופל בפח של היפוך כיוון הסיבוב כפי שקרה לאלגוריתם הקודם שלי?

האם אפשר לנסח אלגוריתם לקריאה של מקודד סיבובי, שפותר לגמרי את בעיית ה-Bounce מצד אחד, ומצד שני לא נופל בפח של היפוך כיוון הסיבוב כפי שקרה לאלגוריתם הקודם שלי?
הפרויקט שלכם זקוק לתקשורת RF אמינה לטווח קצר, בעלות אנרגטית סבירה? המודול HC-11, שמבוסס על השבב CC1101 של TI, עשוי להוות פתרון נוח וזול יחסית. הנה כמה פרטים והוראות שימוש בסיסיות.
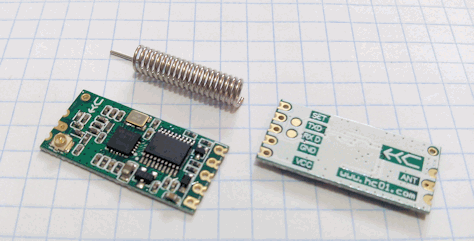
הפעמון האלחוטי הקודם שבניתי לבית נפח את נשמתו. הגיע הזמן ליצור דגם חדש ומשוכלל יותר, והפעם על בסיס מודול התקשורת האלחוטי HC-11.

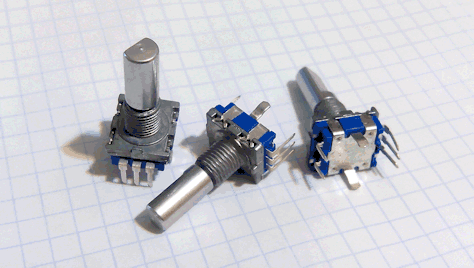
בחינה של האותות שמתקבלים ממקודד סיבובי פשוט (Rotary encoder) הראתה שכאשר פיני הפלט שלו עוברים בין מצבים, קפיצות המתח האקראיות (Bounce) יכולות להיות קצרות מאוד או ארוכות מאוד, בהתאם למהירות הסיבוב של המקודד – עד כדי אי יכולת להבדיל בין קפיצה כזו לבין אות לגיטימי. האם אפשר ליצור קוד שיתגבר על כך וייתן לנו קריאה מדויקת של הסיבובים על פני כל טווח המהירויות?
לפני שלוש שנים, בעודי לומד מה-Datasheet את התכונות הבסיסיות של המיקרו-בקר ATtiny85, גיליתי שאני יכול להפעיל אותו על בסיס אות שעון חיצוני בקצב איטי עד כדי גיחוך של 1Hz. בדיון הזעיר שהתנהל בנושא העליתי את הרעיון של עבודה בקצב איטי עוד יותר – עליית שעון אחת ביום, או 0.000011574Hz – כדי ליצור מערכת שמדליקה לד מדי שבת, כאשר אות השעון מבוסס איכשהו על המחזור הטבעי של יום ולילה.
הרעיון הזה מטופש מכדי להשאיר אותו לנצח בגדר תיאוריה, נכון? 🙂