
עם מודל קיים למדפסת תלת-ממד, לוח ארדואינו קטן וטיפה חיווט ומלאכת יד אפשר לבנות רובוט הולך חמוד שמגיב (קצת) לסביבה. הנה כמה טיפים לבניית הרובוט, שמגניב ילדים בכל הגילים, ויכול ללמד את הגדולים-יותר מביניהם גם דבר או שניים על תכנות ומכניקה.

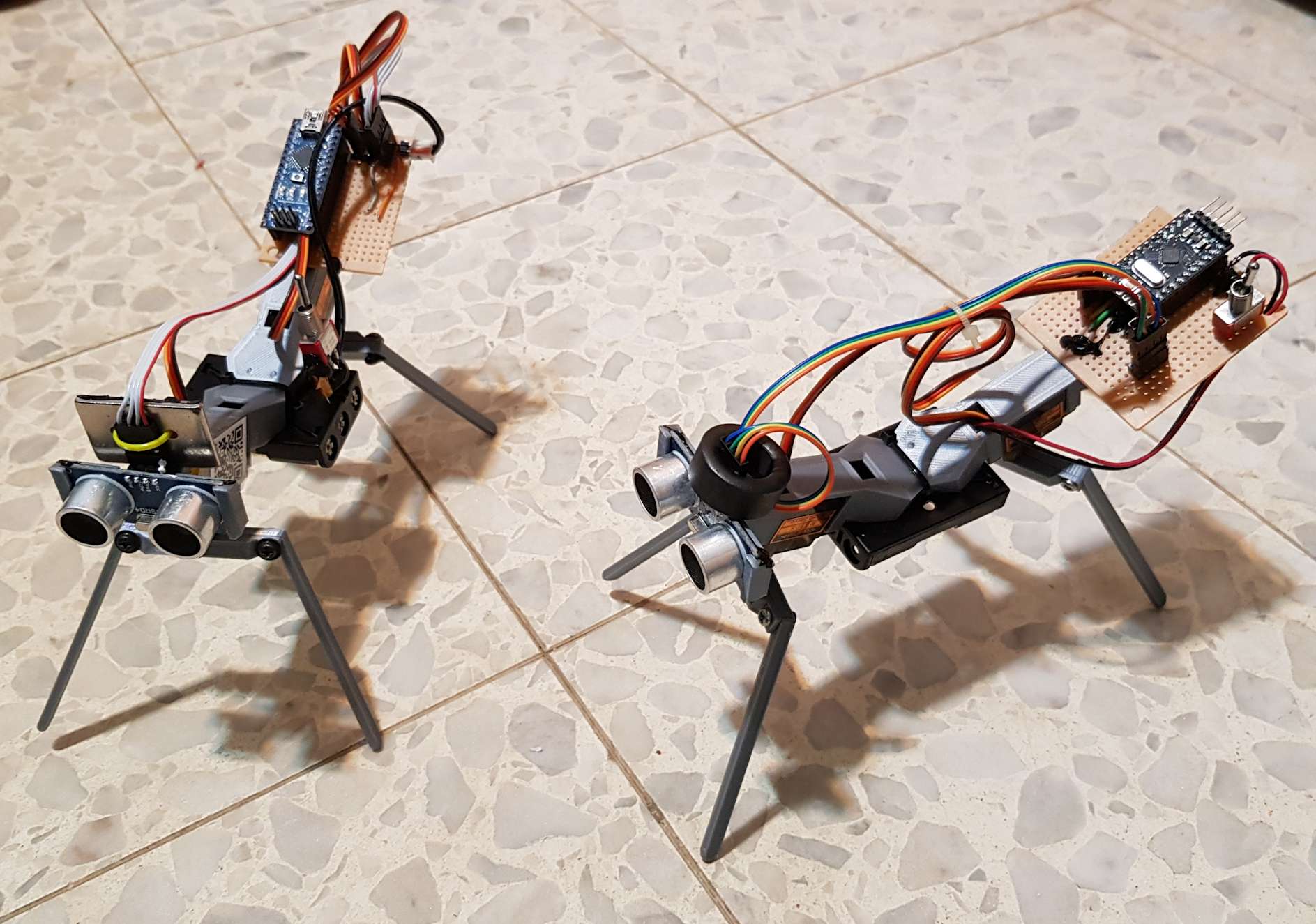
באחד מביקוריי באתר Thingiverse לדגמי תלת-ממד נתקלתי ב-Mantis Walker, מין רובוט ארבע-רגלי שמשלב, פרט לפלסטיק המודפס, גם מנועי סרבו (דגם 9G הקטן והזול), חיישן מרחק ולוח ארדואינו לבקרה. בניגוד לדגמי רובוטים רבים אחרים שראיתי, הוא נראה לי פשוט ומהיר יחסית להכנה, ומצריך מספר קטן של רכיבים – שכבר היו לי ממילא.
חלקים ובנייה
ההורדה מהאתר כוללת, בין השאר, ארבעה קובצי הדפסה: חלקי הרגליים, חלקי הגוף, מחזיק הסוללה (9V), או כולם גם יחד. ההדפסה אורכת בסביבות ארבע-חמש שעות סה"כ, אך אני ממליץ – הסבר יופיע מיד – לוותר על מחזיק הסוללה. בנוסף, יש קובץ PDF עם מפרט רכיבים, הוראות הרכבה וחיבור חשמלי, וכן קוד תוכנה לארדואינו. טוב ויפה בתיאוריה, אבל איך זה בפועל?
הדבר הראשון שהדפסתי היה הרגליים. כל זוג מודפס כשני חלקים נפרדים, שמבריגים יחד והם מחזיקים ביניהם זרוע פלסטית של סרבו (אותה אנחנו אמורים לקבל ביחד עם הסרבו, זה לא חלק מההדפסה). אולי בגלל המדפסת שלי ואולי בגלל הסרבו, השקעים בחלקים המודפסים היו קטנים מדי עבור הזרוע, והיה צורך להפעיל הרבה לחץ – עד כדי התעקמות מסוימת של ההדפסה – כדי שזה יתאים. כדאי אולי להגדיל בתוכנת הפריסה את החלקים המודפסים בכמה אחוזים, ליתר ביטחון. יוצר הדגם המליץ על ברגים ספציפיים (4G, שישה מילימטרים), אך אני פשוט מצאתי משהו בתפזורת הברגים שלי, אז אני לא יכול לומר עד כמה הדגם המודפס מתאים להמלצה הרשמית.
מחזיק הסוללה המודפס אמור לתפוס אותה בלחץ, מה שאומר שאם הוא אפילו טיפה גדול מדי היא תחליק החוצה, ואם המחזיק טיפה קטן מדי (או שהחומר לא גמיש מספיק), הוא יישבר מיד, כמו שקרה אצלי. בכל מקרה הרעיון של סוללת 9V לארדואינו וסרבואים לא נראה לי, כי הקיבולת שלה די נמוכה והמתח גבוה מדי ו"מתבזבז" בהמרה. במקום זה, חיברתי לבטן הרובוט בעזרת דבק חם ואזיקון בית לשלוש סוללות AAA בטור. עם סוללות אלקליין ובחיבור ישיר לפין 5V של ארדואינו, זה עובד מצוין.
התפסים מקדימה, לחיישן מרחק אולטרסוני HC-SR04 סטנדרטי, הם די מדויקים – החיישן נכנס למקום בלי יותר מדי בעיות ונשאר שם. עם זאת, כשהטלטולים מתחילים יש סיכוי שהוא יזוז או יישמט, ולכן כדאי להוסיף מעט דבק חם בפינות.
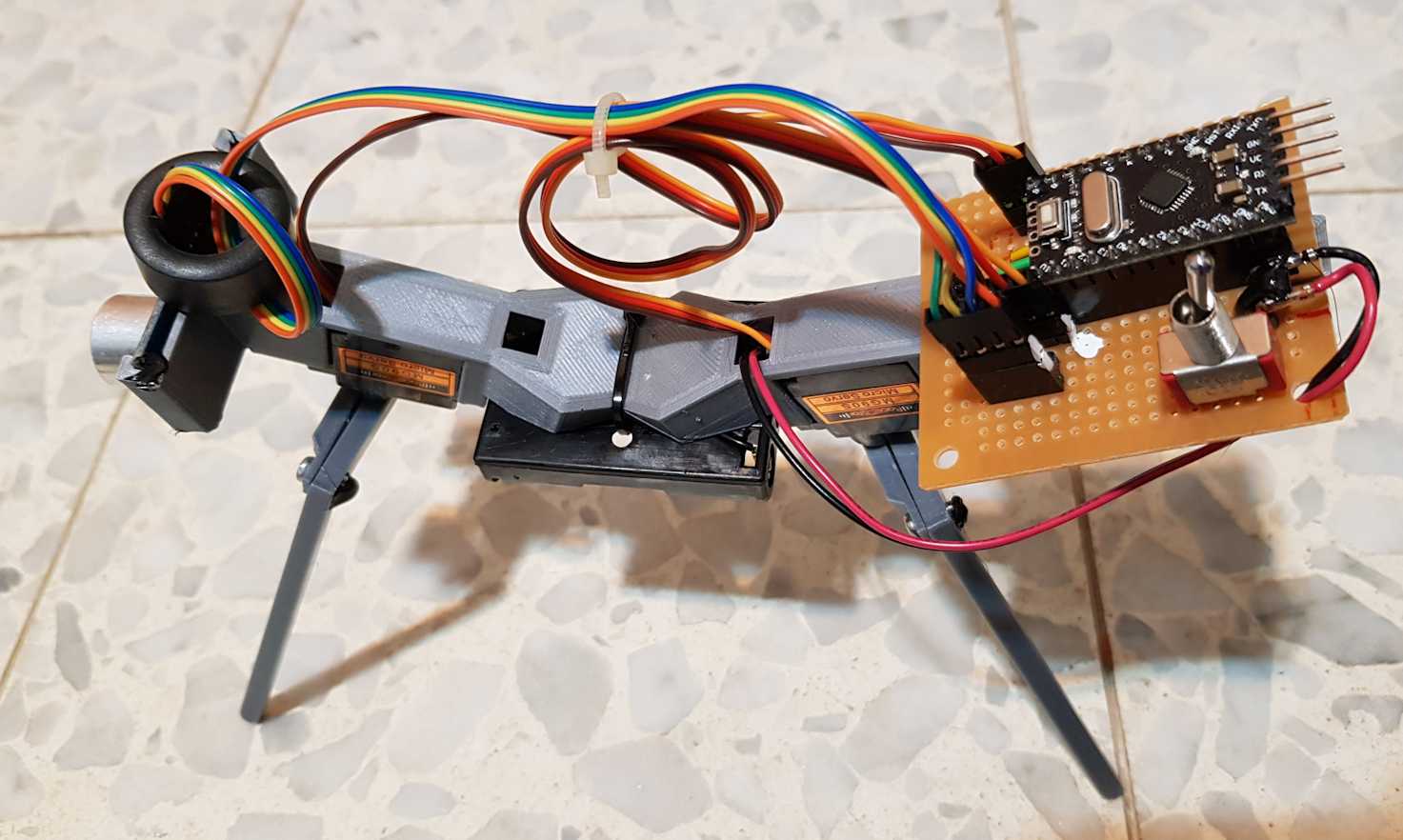
צריך ברגים גם בשביל לחבר את שני חלקי הגוף יחדיו, וכדי להצמיד אליו את הארדואינו. העניין הוא שאין תושבת מסודרת לארדואינו, רק אזור שטוח צר עם שני חורים לברגים. ההוראות מראות את סכמת החיבורים החשמלית, אבל לא איך ליצור את הלוח הפיזי עם ההלחמות הדרושות. בנקודות האלה צריך לאלתר ולתכנן לבד.
התוכנה
מראש לא הייתה לי שום כוונה להשתמש בתוכנה המוכנה, אז אפילו לא הסתכלתי עליה. חיברתי את הסרבואים והחיישן לפינים שהיו נוחים לי, והתחלתי לכתוב קוד. זה השלב שבו הדברים נעשים מעניינים. איך לתזמן את פעולות הסרבו כך שהרובוט באמת יתקדם? האם כל זוג רגליים צריך לזוז בזמן נפרד, או שניהם ביחד? האם שניהם לאותו כיוון? עד אותן זוויות? באותו קצב? מה יקרה אם נשנה כל אחד מהפרמטרים האלה? אפשר לעשות המון ניסויים קטנים כאלה עם הילדים (וסקרנים אחרים) כדי לחפש דפוסים יעילים לתנועות שונות. זהו תרגיל גם בתכנות וגם בחשיבה מכנית – להסתכל מה השתנה בתנועה בעקבות שינוי בקוד, ולנסות להבין למה בדיוק זה קרה ואיך לשפר את שניהם.
דבר אחד שהבחנתי בו והוא לא מובן מאליו, זה שהרובוט קל מדי וקצות הרגליים שלו קטנים מדי: לכן, כשהסרבו זז מהר, הרגליים פשוט החליקו על הרצפה, בלי קשר לתזמון. תוספת של משקולת קטנה מקדימה – בתמונה הבאה, טבעת Ferrite מעל החיישן – הספיקה כדי לפתור את הבעיה וגם לתת לרובוט העדפה לתנועה לפנים. בגרסה הראשונה גרמתי לו לעצור לגמרי כשהוא מבחין במכשול קרוב, ואילו בגרסה השנייה זיהוי מכשול גרם להפעלה של רצף תנועות אחר, שסובב את הרובוט ימינה עד שהמכשול "נעלם". אפשר כמובן לגוון הרבה יותר ולהוסיף חיישנים ופעולות כיד הדמיון הטובה עליכם.
הניסיון מלמד שילדים אוהבים רובוטים באופן כללי, אבל משהו בדגם הזה במיוחד מקסים אותם – אולי המבנה שמזכיר קצת חרק (היו שקראו לו "נמלה") בשילוב עם ההליכה הנמרצת הקומית, וכמובן העובדה שהוא מגיב לנוכחותם באופן עצמאי, אפילו אם זו תגובה מאוד בסיסית.