האם אפשר לנסח אלגוריתם לקריאה של מקודד סיבובי, שפותר לגמרי את בעיית ה-Bounce מצד אחד, ומצד שני לא נופל בפח של היפוך כיוון הסיבוב כפי שקרה לאלגוריתם הקודם שלי?
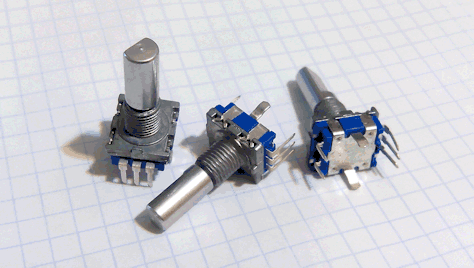

האם אפשר לנסח אלגוריתם לקריאה של מקודד סיבובי, שפותר לגמרי את בעיית ה-Bounce מצד אחד, ומצד שני לא נופל בפח של היפוך כיוון הסיבוב כפי שקרה לאלגוריתם הקודם שלי?
לפני שלוש שנים, בעודי לומד מה-Datasheet את התכונות הבסיסיות של המיקרו-בקר ATtiny85, גיליתי שאני יכול להפעיל אותו על בסיס אות שעון חיצוני בקצב איטי עד כדי גיחוך של 1Hz. בדיון הזעיר שהתנהל בנושא העליתי את הרעיון של עבודה בקצב איטי עוד יותר – עליית שעון אחת ביום, או 0.000011574Hz – כדי ליצור מערכת שמדליקה לד מדי שבת, כאשר אות השעון מבוסס איכשהו על המחזור הטבעי של יום ולילה.
הרעיון הזה מטופש מכדי להשאיר אותו לנצח בגדר תיאוריה, נכון? 🙂
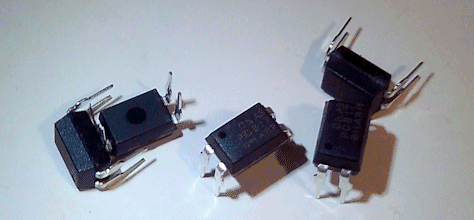
לפעמים, כשפועלים במערכת שלנו מתחים שונים או רכיבים רגישים, נרצה להעביר אותות בין חלקי המעגל תוך כדי שמירה על בידוד חשמלי ביניהם. המבודד האופטי (או "מצמד אופטי" – Optocoupler) הוא אחד הכלים הנוחים למשימה. הנה הדגמה קצרה עם רכיב מדגם PC817 של חברת Sharp.
כשהפעמון האלחוטי הסיני לא עומד בציפיות, זה הזמן לפרק אותו, להוסיף אלקטרוניקה משלי ולהפוך אותו למערכת ראויה לשמה.
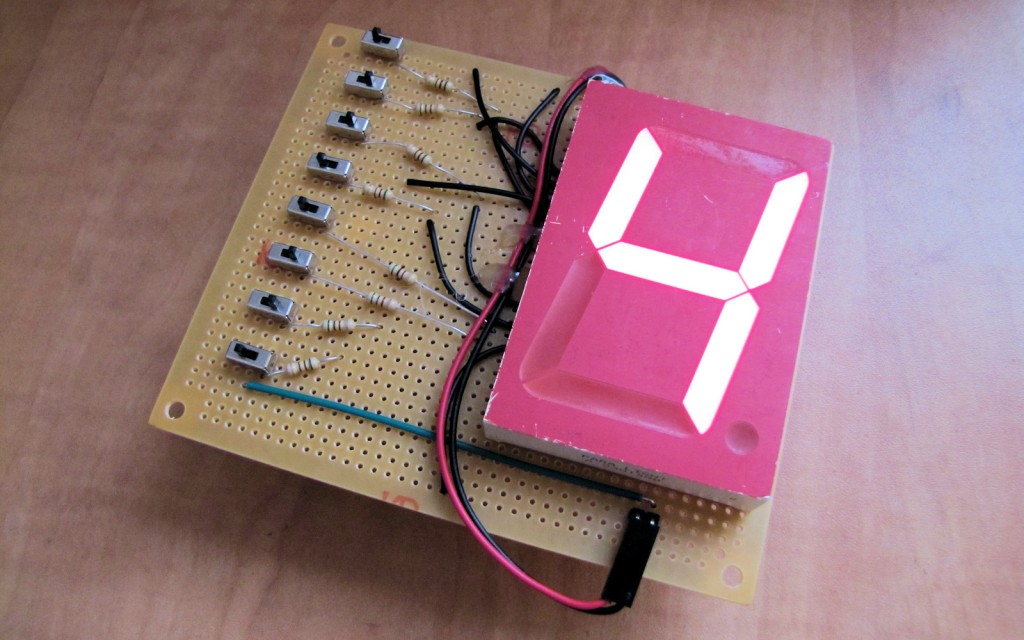
פרויקט אלקטרוניקה קטן שעשיתי עם ובשביל הילדים התגלה כהצלחה גדולה מבחינה לימודית. אז מה בעצם אפשר ללמוד משמונה מפסקים קטנים ותצוגת שבעה-מקטעים אחת גדולה?
אם יש לכם לוחות ארדואינו לא מקוריים ישנים (דגמי Duemilanove או Uno עם שבב תקשורת של Prolific או FTDI), ומערכת הפעלה Windows חדשה, סביר להניח שהלוחות יפסיקו – או כבר הפסיקו – לעבוד. למה זה קורה ומה עושים?
תזמון של אותות בקרה למספר מנועי סרבו במקביל הוא עסק קצת יותר מסובך ממה שנראה במבט ראשון. איך פתרו את זה (כמעט לגמרי) בארדואינו, ומה צריך לקחת בחשבון אם רוצים ליצור פתרון אוניברסלי באמת?
ללוחות ארדואינו הנפוצים יש קילובייט אחד של זיכרון EEPROM, ששומר על תוכנו גם כשהלוח אינו מחובר לחשמל. אם הפרויקט שלכם מחייב יותר מקילובייט, או כולל מיקרו-בקר ללא EEPROM, אפשר להשלים את החסר בעזרת שבבי EEPROM ייעודיים. מבין אלה, משפחת השבבים AT24Cxx היא אופציה זמינה, זולה מאד וקלה לשימוש. בואו ונראה איך משלבים אותה בפרויקט.
בתכנון של מערכות Embedded אנחנו עובדים תמיד במסגרת אילוצי משאבים. לפעמים האילוצים האלה מכתיבים את הכדאיות של צורות מימוש שונות – והאופן שבו זה קורה לא תמיד מובן מאליו . בפוסט זה אציג חישובים שערכתי כדי לבדוק, על הנייר, את צריכת החשמל של שתי חלופות במערכת שבה הפרמטר הזה חשוב במיוחד.
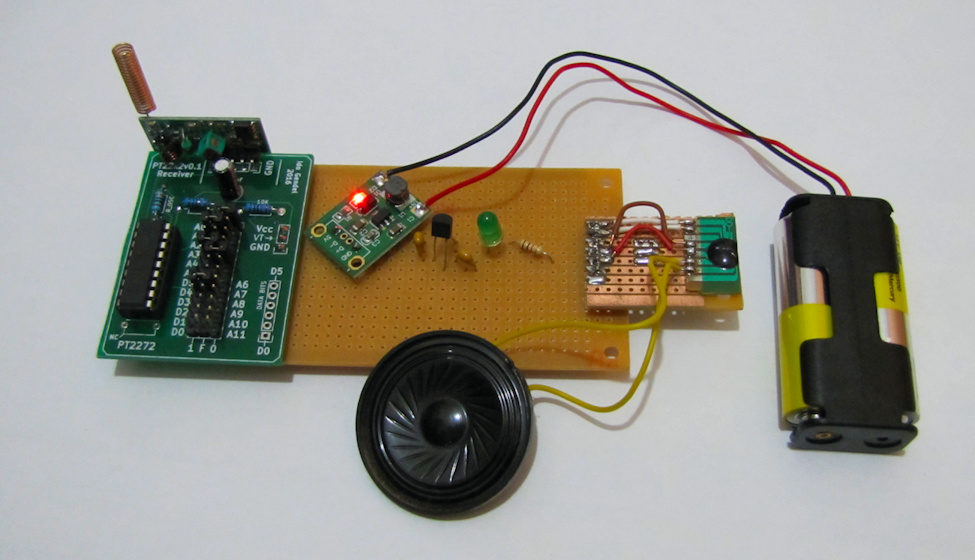
בפוסט זה אסביר איך יצרתי, באמצעות ארדואינו, שידור תואם לפרוטוקול של PT2262, ואציג את הבדיקות שביצעתי עם המערכת הזו כדי לבחון אספקטים מסוימים בהתקפת OpenSesame החדשה של ההאקר סמי קמקר.