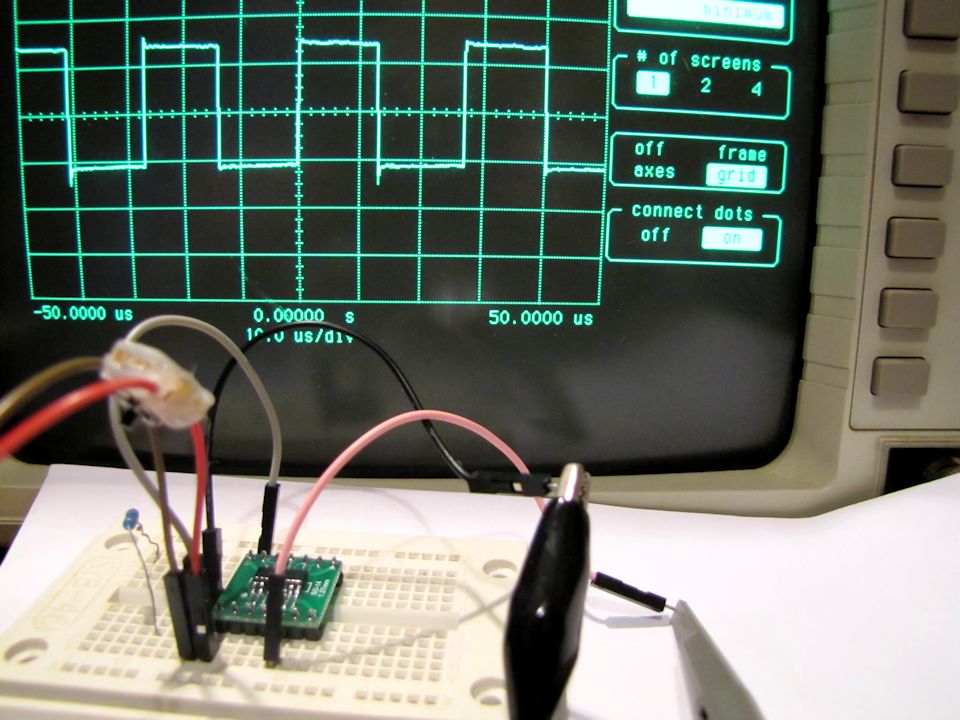
בפוסט זה אראה כיצד גורמים למיקרו-בקר מדגם PIC16F616 להפיק גל ריבועי בתדר 38KHz, השימושי כזכור לתשדורות באינפרה-אדום (IR), באמצעות מודול ה-PWM המובנה בחומרה. זה נשמע טכני וזה באמת טכני – אבל אם יום אחד תצטרכו לממש PWM ב-PIC, אתם תגידו לי תודה על הפוסט הזה…
הצלחה! אות PWM בתדר הנכון על הסקופ והג'וק שיוצר אותו
פיני פוגו (Pogo Pins), שקיבלו את הכינוי הזה בגלל דמיונם לצעצוע המפורסם, משמשים בדרך כלל ליצירה של מגע חשמלי זמני אך יציב בין מודולים ולוחות למיניהם, לצורך בדיקות, צריבות קוד או נתונים ועוד. הנה הסבר מפורט קצת יותר, והדגמה של החבר'ה האלה בשטח.
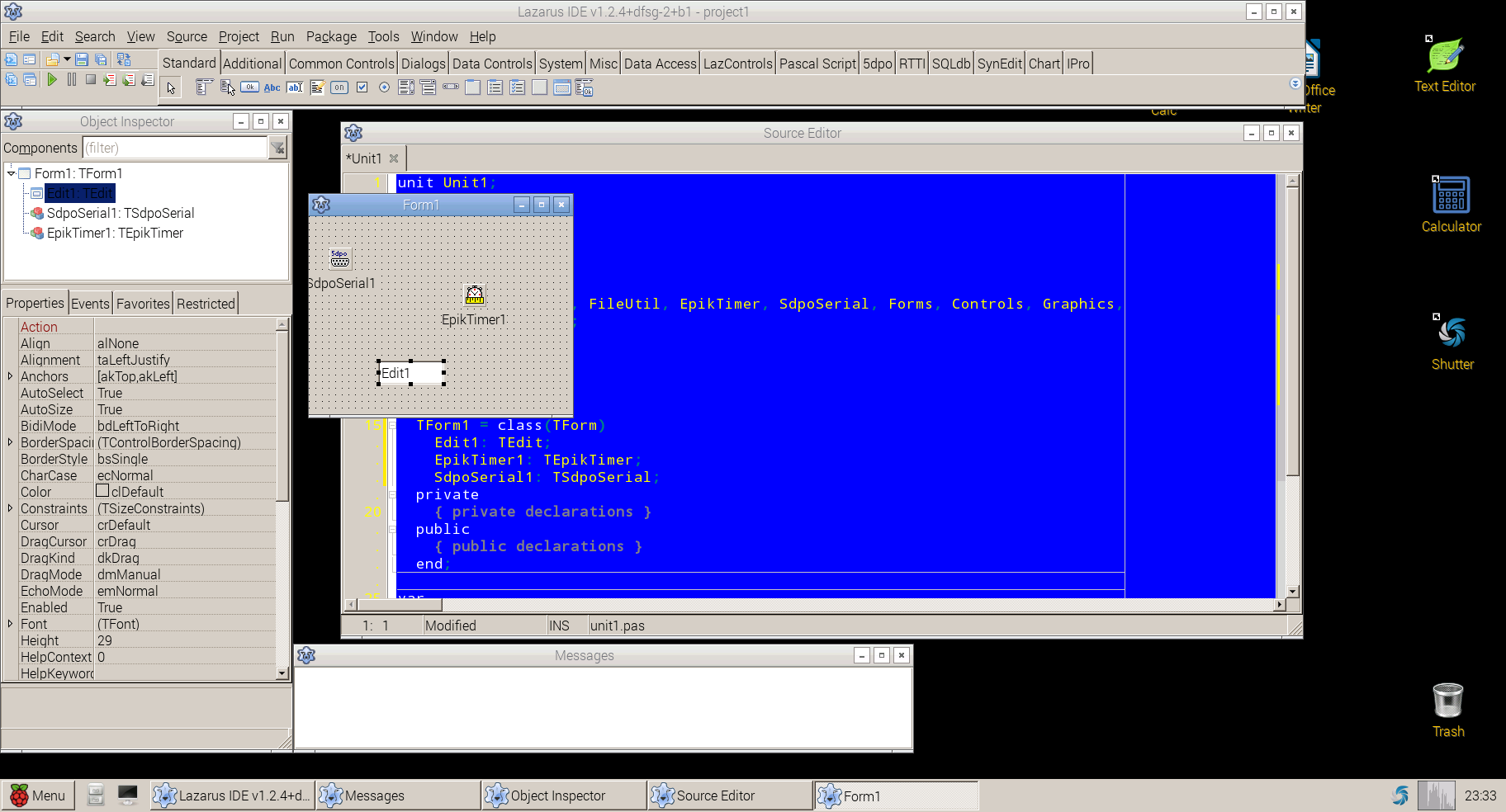
אחד הדברים שהכי רציתי לרספברי פיי החדש (כלומר, החדש אצלי, לא הדגם החדש…) היה התקנה נורמלית של סביבת הפיתוח Lazarus לשפת Object Pascal. אחרי הרבה עבודה שחורה, וכמה טקסי מאגיה שחורה עוד יותר, זה הצליח. מה זאת אומרת התקנה נורמלית, ולמה זה טוב?
בתזמון הכי גרוע שאפשר – בקושי יומיים אחרי ההכרזה הרשמית על הדגם החדש והחזק הרבה יותר – הגיע אליי סוף כל סוף לוח Raspberry Pi B+ שהזמנתי לפני יותר מחודשיים(!) ב-Aliexpress. להלן הפרטים והרשמים הראשונים מתהליך ההתקנה.
אם עקבתם אחרי הבלוג הזה מספיק זמן, שמעתם כבר לא מעט על פסיקות (interrupts). אבל מה בדיוק קורה מאחורי הקלעים כשהפסיקות האלה מתעוררות ומפריעות לקוד ה"רגיל", איך זה משתנה בין משפחת מיקרו-בקרים אחת לאחרת, ואיזו שיטה – אם בכלל – יעילה יותר?
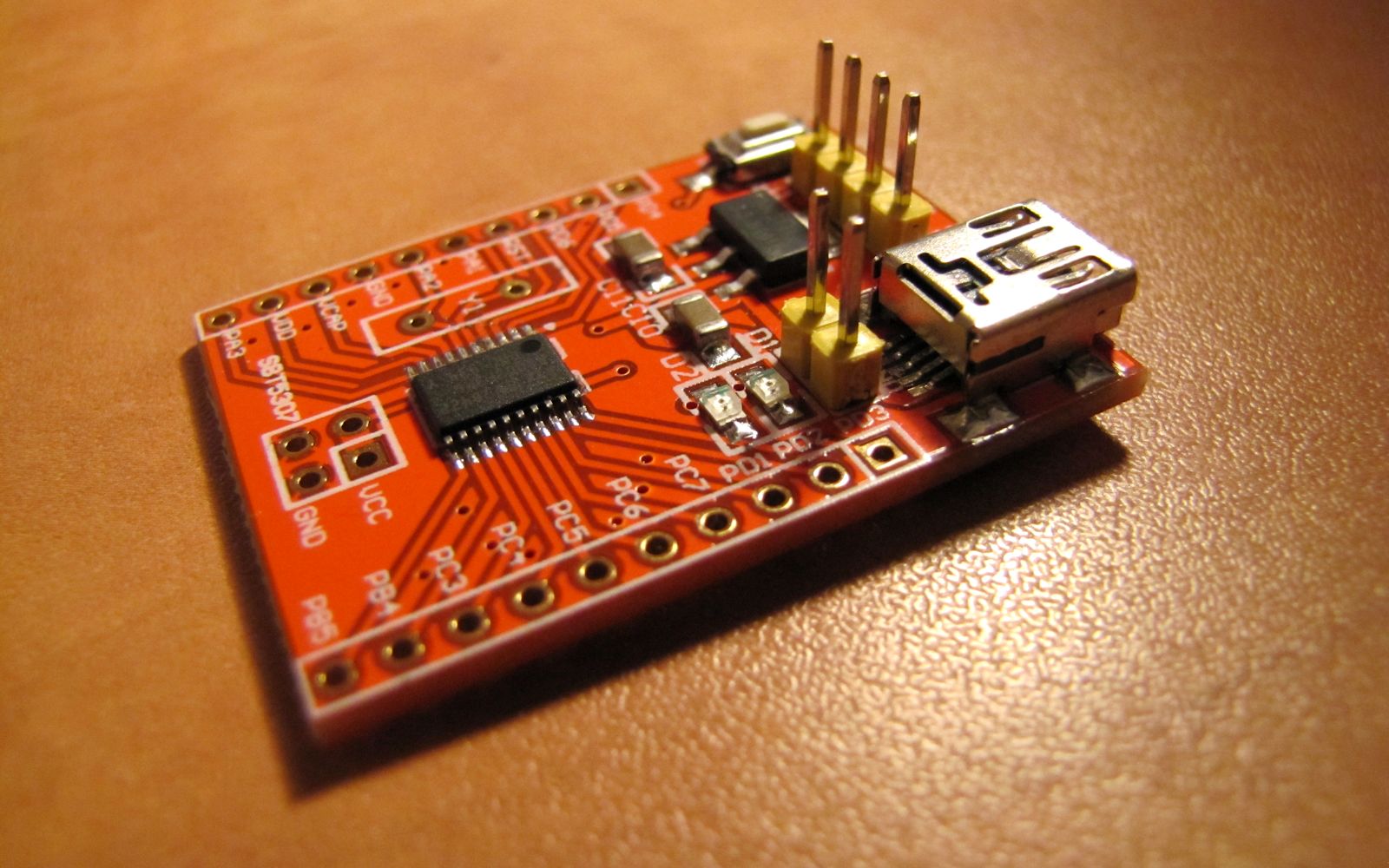
כשהמחיר של לוחות פיתוח צולל לשני דולרים ומטה, קשה לעמוד בפיתוי – ולסדרות "הלו טייני" ו"הלו פיק" בבלוג מצטרפת סדרה חדשה: "הלו אסתי", שבה אתחיל לחקור מיקרו-בקרים 8-ביט מתוצרת חברת STMicroelectronics האירופאית. פוסט הקדמה זה יוקדש, כרגיל, ל"שרשרת הכלים" איתה אנסה, לפחות, לעבוד בשלב הראשון.
ללמוד ברמה אקדמית מטובי המרצים באוניברסיטאות המובילות בעולם, בזמן שלכם, בחינם ודרך האינטרנט; נשמע כמו מדע בדיוני? ובכן, זו עדיין לא בדיוק מציאות בשטח, אבל בשנים האחרונות נעשו צעדים גדולים להגשמת החזון הזה, בדמות אתרי קורסים מקצועיים באינטנרט. בפוסט זה אתאר את התרשמותי משני אתרים בינלאומיים מובילים בתחום: edX ו-Coursera.
תוך כדי עבודה על יצירת גל ריבועי באמצעות טיימר לצורך שידורי IR, עלה בדעתי שימוש נוסף לטכניקה הזו: שליטה במנועי סרבו. איך גורמים לטייני להפיק את הסיגנל הנכון – ומהו בעצם הסיגנל הזה?